https://code.ihub.org.cn/projects/578

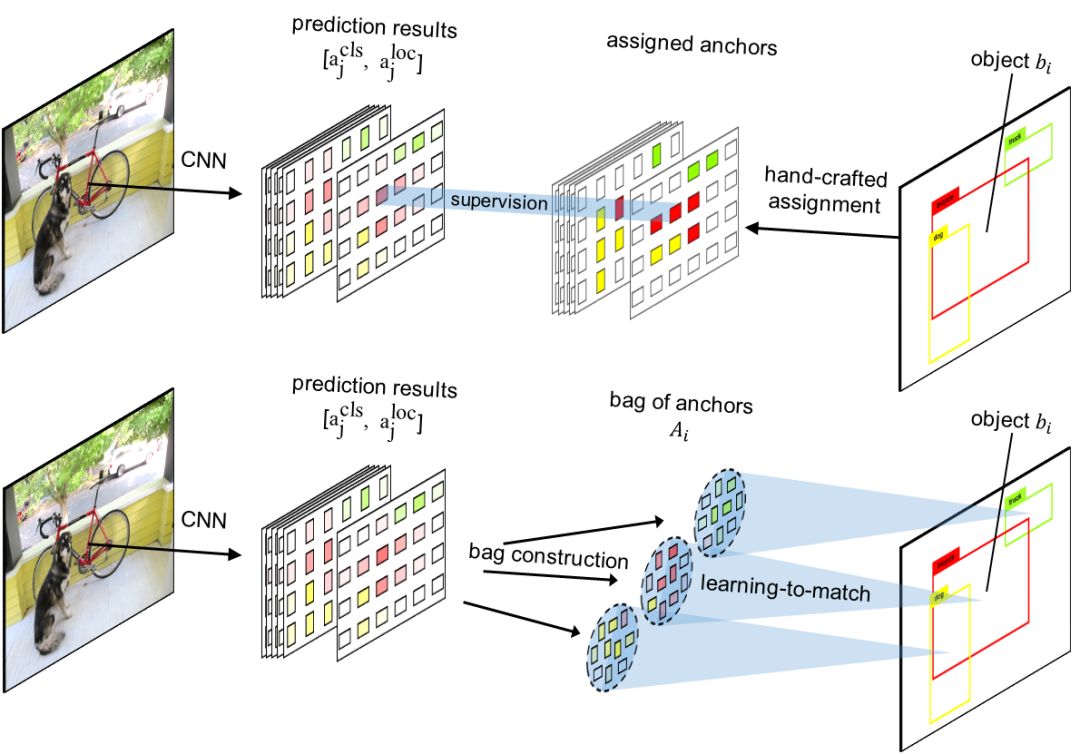
圖 1 手工設計錨框劃分(上圖)和自由錨框匹配的對比(下圖)

圖 3 為“筆記本電腦”學習匹配錨框(左)與手工設計錨框分配的比較(右),紅點表示錨中心。較紅的點表示較高的置信度。為清楚起見,我們從所有50個錨框中選擇了16個長寬比為1:1的錨框。
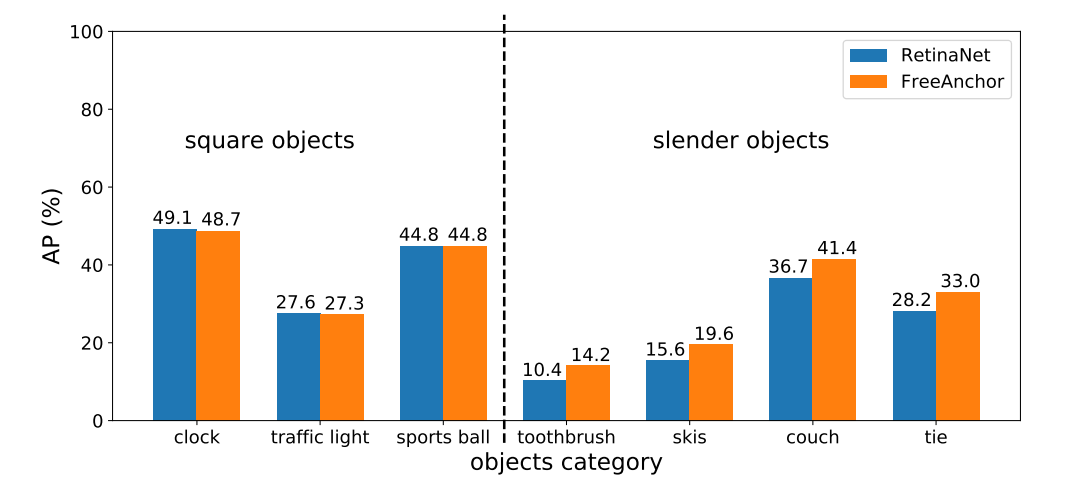
圖 4 方形和細長類別物體的性能對比
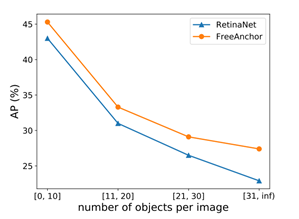
圖 5 擁擠場景的性能對比
 )定義為給定IoU閾值τ時,在NMS之前和之前的召回率之比。遵循COCO中AP的定義方式,NR被定義為τ從0.50以0.05為間隔變化到0.90中NRτ的平均值。在表1.中我們用NRτ比較了RetinaNet和FreeAnchor。可以看出,FreeAnchor的NR值顯著高于RetinaNet,意味著與NMS的兼容性更高,驗證了自由錨框匹配損失可以實現分類和定位的聯合優化。
)定義為給定IoU閾值τ時,在NMS之前和之前的召回率之比。遵循COCO中AP的定義方式,NR被定義為τ從0.50以0.05為間隔變化到0.90中NRτ的平均值。在表1.中我們用NRτ比較了RetinaNet和FreeAnchor。可以看出,FreeAnchor的NR值顯著高于RetinaNet,意味著與NMS的兼容性更高,驗證了自由錨框匹配損失可以實現分類和定位的聯合優化。
表 1 COCO驗證集上的NMS召回率(%)比較

表 2 FreeAnchor和RetinaNet(基線)的檢測性能比較
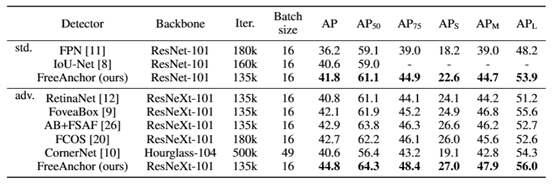
表 3 FreeAnchor與其他方法的檢測性能比較
來源 | 鵬城實驗室
撰稿 | 人工智能研究中心 陳杰 旺靜然